文章分類Article
關於電感式位置感測器的11個誤解
人工智慧(AI)是我們期待已久的一種技術,目前已得到廣泛實施。從自動化工廠、自動駕駛汽車和卡車到機器人司機,我們正不斷見證著AI如何協助自動機械提高效率、實現盈利及改善我們的生活。這些自動機械和汽車的核心是其準確測量位置和運動的能力。
有多種方法可以測量位置,但發展最迅速的一項技術當屬電感式位置感測器。準確性、抗噪性和成本效益是這項技術的幾大優勢。本文將逐一消除對電感式位置感測器的一些誤解,並將其與其他感測器技術(例如霍爾效應感測器和磁阻感測器)加以對比。
誤解1:電感式感測器使用電感來測量位置
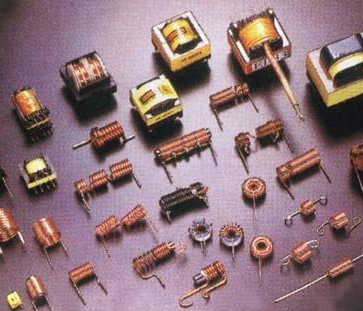
圖一 : 電感式位置感測器範例
看名稱字面上可能會造成混淆,但事實是,電感式感測器不測量電感,而是使用金屬目標中磁場的電磁感應以及空氣芯變壓器眾所周知的屬性和法拉第定律來準確定位目標對這一磁場的干擾。有許多人早已將在學校學到的電磁場理論知識忘光,因此可能會覺得很複雜,不過我們可以簡單歸納為:電感式感測器測量的是導電目標對磁場的干擾。
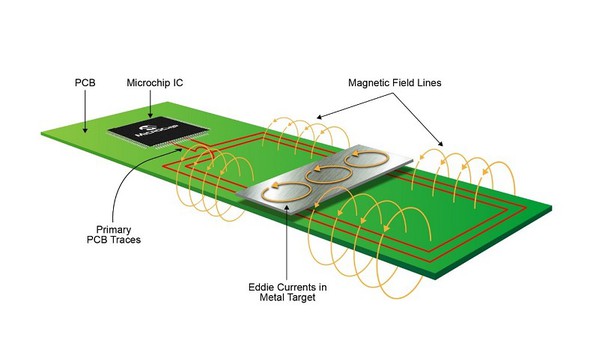
此外,該磁場不是由霍爾效應感測器和磁阻感測器所需的永磁體產生的,而是由變壓器的初級繞組產生的。使用兩個次級線圈檢測該磁場,就像使用變壓器一樣,我們使用法拉第定律將該磁場轉換為電壓。放置在該磁場中的金屬目標將感應出與磁場方向相反的渦流,使目標的場強降至零。透過放置在不同的物理位置,兩個接收線圈將檢測到不同的電壓。只需計算這兩個接收線圈的電壓之比,即可計算出目標的位置。
誤解2:電感式位置感測器不準確
這個誤解可以輕鬆消除,因為電感式位置感測器非常準確,即使是在導致其他基於磁體的系統出現問題的高溫環境下,也能表現出優異效能。電感式位置感測器能夠如此準確的主要原因是它們不依賴於永磁體的非線性特徵,而是僅關注自生磁場的干擾。
結果是室溫下可實現小於整個測量範圍的+/-0.1%的誤差。在溫度以及目標與感測器之間的氣隙發生變化時,可實現小於+/-0.3%的誤差。此外,完整演算法旨在消除溫度變化或最大程度地減小其影響。例如電感式位置感測器將以1 MHz到6 MHz之間的頻率激勵磁場,但會使用LC振盪器。這兩個量可能會隨溫度變化,但這對位置沒有影響,原因是次級接收通道使用同步解調,這是主振盪器的功能。
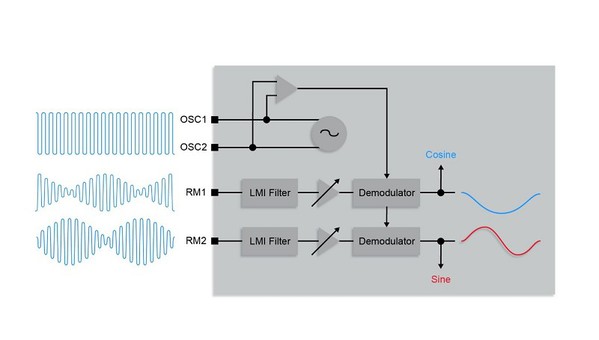
圖二 : 同步解調器範例
這種漂移不會對接收訊號的幅值產生任何影響。除溫度外,感測器附近的金屬物體也可能對磁場產生影響。因此,需要一定程度的校準,但校準不隨溫度變化。例如Microchip的LX3302A使用八個校準段。13位元類比數位轉換器(ADC)和32位元處理器還有助於消除可能出現的任何計算和量化誤差,進而在整個測量範圍內提供12位元輸出解析度。
誤解3:電感式位置感測器價格昂貴
做到兩全其美(以合理的價格實現優異的效能)並不容易,但電感式感測器能夠完美兼顧。霍爾效應感測器和磁阻感測器要求製造的永磁體具備適當的公差和強度以獲得理想的精確度,而電感式感測器只需要一塊金屬作為目標即可,能夠為使用者節省磁體的費用。儘管需要較大的PCB來對感測器走線進行佈線,但這通常要比磁體的成本低得多。
如果有額外的PCB空間,那麼這一部分可以做到免費。因此,電感式位置感測器是比霍爾效應解決方案和磁阻解決方案更具成本效益的一種解決方案,因為它無需磁體即可提供磁場檢測。
誤解4:電感式位置感測器對外部磁場敏感
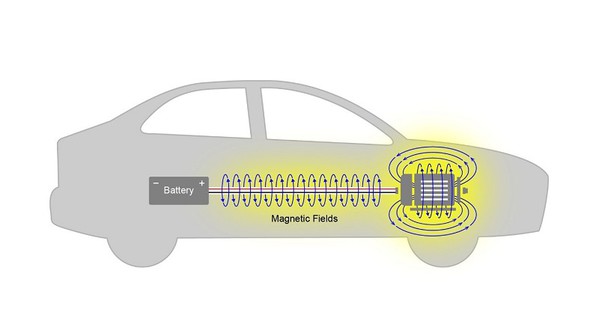
圖三 : 馬達和大電流產生高雜散磁場
當今的自動機械正在產生比以往更多的雜散磁場,這導致霍爾效應感測器和磁阻感測器出現問題。電感式位置感測器使用主動解調來抑制這些雜散磁場。
新一代電動汽車可能有幾百安電流從電池流向牽引馬達。此外,大多數汽車都具有超過三個用於移動汽車的無刷直流(BLDC)馬達、電子動力轉向和煞車輔助馬達。所有這些系統都會產生雜散磁場。由於這些雜散磁場迅速增加,新規範要求在更高的磁場下進行更多抗擾度測試。在汽車工業中,汽車電子元件目前在EMC認證期間會受到4 mT直流磁場的影響,而任何安全關鍵型感測器(動力轉向、油門踏板和牽引轉子位置)中都不得出現錯誤讀數。
電感式位置檢測的優點在於,它不受這些雜訊的影響,因為它僅會主動過濾需要檢測的頻率。由於電感式位置感測器不使用任何磁性材料,因此不會拾取任何直流磁場。換句話說,對於靜磁場,法拉第定律為零。
此外,上述同步解調器將濾除高於和低於主激勵頻率的其他頻率,方法與在天線拾取整個AM波段時選擇一個AM無線電臺幾乎相同。霍爾效應感測器和磁阻感測器均無法實現相同類型的抑制。
誤解5:電感式位置檢測是新技術
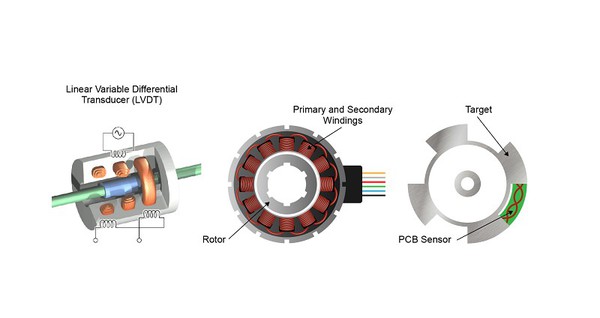
圖四 : LVDT、旋轉變壓器和感測器
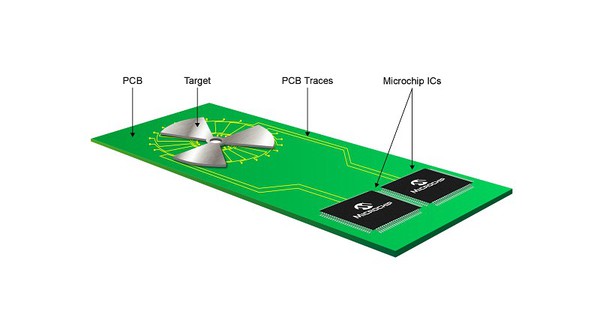
電感式位置感測器使用PCB作為感測器,並使用一塊金屬作為目標。儘管這可能是一種實現檢測的新方法,但這項技術由來已久。線性電壓差動變壓器(LVDT)與電感式位置檢測非常接近。LVDT將使用一個初級線圈和兩個次級線圈來檢測機器人應用中金屬軸的位置。電感式位置感測器使用許多相同的技術將繞組減少到僅為一塊PCB。磁性旋轉變壓器(LVDT的旋轉版本)也使用類似的技術。
再次說明,電感式位置感測器可代替外觀類似變壓器的金屬結構,實現相同的功能,只需要在PCB上合理佈線即可。為了檢測位置,LVDT、旋轉變壓器和電感式感測器會採用導電元件對磁場的干擾所引起的兩個電壓之比。
誤解6:備援電感式感測器需要雙倍空間
圖五 : 備援感測器
關鍵的汽車和工業應用通常需要通過備援來提供最高安全級別。通過優化PCB層和一些智慧初級繞組技術,雙感測器不需要使PCB空間加倍。兩個感測器可以位於同一PCB空間中。
在這種情況下,它們共用同一個磁場(通過磁場鬆散耦合),並且仍提供電流隔離。次級側可以連接到兩個IC,然後輸出獨立且備援的位置,從而提高應用的安全性。
誤解7:電感式位置感測器只能處理小型線性測量
電感式位置感測器可以測量許多不同長度的線性位置。當感測器的長度接近於近乎理想的測量範圍時,可以達到最佳精度,從而可在最短的距離上調整輸出解析度。此感測器的長度範圍為5 mm至600 mm,實際應用中可能超過這一範圍。長度的任何限制都與振盪器產生正確LC諧振訊號的能力有關。
在所有情況下,工作原理都是相同的:產生磁場,檢測干擾。線性測量是這項技術的絕對優勢,可以在多個實際測量範圍內應用一種測量原理來實現靈敏度。或者,當磁體從一個位置移動到另一個位置時,一個霍爾效應感測器可能需要多個霍爾效應感測器進行多工。這種多工的交叉處理相當複雜,並且可能受到溫度的影響。電感式感測器不受此困難的影響,經設置可輸出符合應用要求的線性測量值。
誤解8:電感式位置感測器只能進行線性測量
儘管線性測量是這項技術的絕對優勢,但電感式位置感測器還可以更高的精度和更出色的抗噪性,測量旋轉和弧形檢測目標軌跡。汽車踏板、空氣閥、水閥和轉子位置都是可以使用電感式檢測技術的檢測案例,可以將360度旋轉感測器僅看作兩端彎曲相交的線性感測器。
事實證明,旋轉電感式位置感測器是最精確的感測器,因為所產生的磁場在每個半徑上都非常均勻。這項技術支援線性、弧形和旋轉測量。
誤解9:目標材料必須是磁性的

圖六 : 金屬結構中感應出的渦流
電感式位置感測器檢測磁場的變化,該磁場受金屬目標干擾,但是不需要磁性材料。任何傳導電流(允許感應渦流流過)的材料都會引起這種干擾。諸如鐵之類的磁性材料具有導電性,因此也可以使用,但如果目標金屬由銅、鋁或鋼等良導體製成,則其檢測距離會更合理,供電電流也更低。
誤解10:電感式位置感測器需要透過輸入電源進行程式設計
在汽車中,許多感測器應用都位於通過一組電線連接到發動機控制單元的模組中。對於感測器,這通常由電源線、地線和輸出接腳組成。如果能夠通過電源接腳校準模組,則可確保不需要與感測器PCB進行其他連接,從而節省成本和避免裝配問題。
但是,某些應用需要微控制器,這種情況下,嵌入式應用將使用另一個微控制器而不是專用測試系統來程式設計感測器。Microchip的LX3302A具有這種功能,允許通過GPIO接腳進行程式設計。
誤解11:使用者需要自行設計
不久之前,要想獲得良好的結果,必須具備扎實的磁場知識,並且能夠使用高階有限元模擬套件或完成大量的反復試驗。如今,IC供應商正透過評估板和評估工具包為他們的客戶提供這類服務,以協助使用者從概念階段順利過渡到實際的PCB走線模擬階段。一些供應商甚至會提供模擬結果,以在測試PCB之前估算感測器將會出現的誤差。Microchip提供了這種幫助,這樣您就不會覺得是自己在進行PCB設計。
上面的11個誤解給出了電感式位置感測器與霍爾效應感測器和磁阻感測器的比較情況,分別說明了精度、抗雜散磁雜訊能力和成本效益。您準備好在下一個AI位置檢測產品上嘗試這項技術了嗎?
(本文作者Mark Smith為Microchip 公司混合與線性訊號產品部產品行銷經理)
文章源自:CTIMES / 文章 【作者: Mark Smith】